Прибор контроля перемещения своими руками
Прибор для измерения величины перемещения изготовить самостоятельно практически невозможно.
Однако радиолюбители достаточно часто собирают из вышедшей из строя радио и электронной аппаратуры датчики движения, которые с успехом используются в системах безопасности и жизнеобеспечения.
Например, датчик можно использовать для включения света в туалете, когда в помещение санузла заходит человек. Не менее популярны подобные устройства для включения-отключения освещения в жилых помещениях.
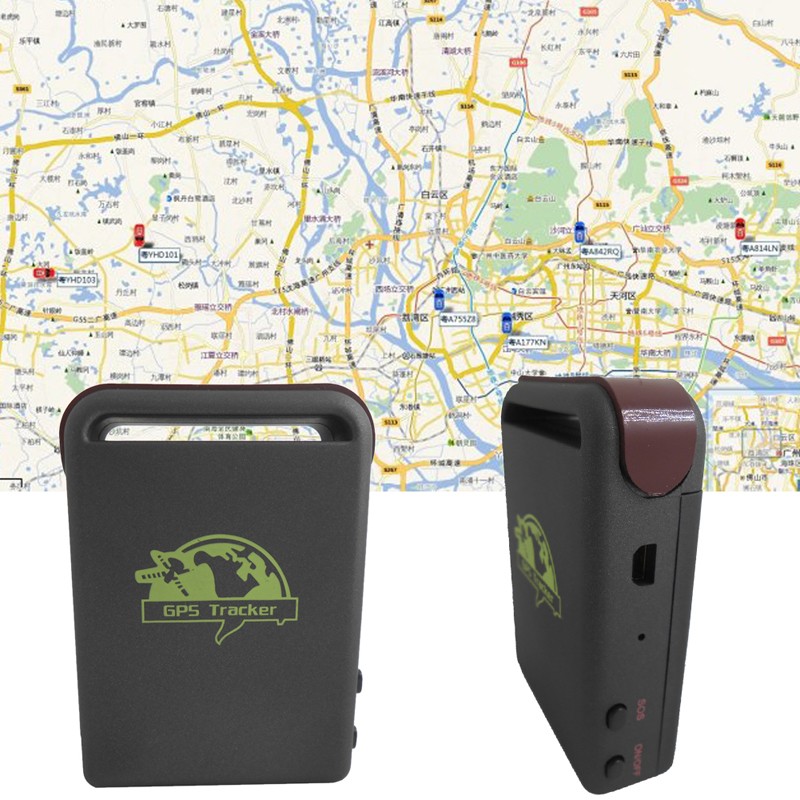
И конечно эти приборы незаменимы при формировании собственной системы безопасности, где они фиксируют любую попытку (неважно человек это или животное) несанкционированного проникновения на территорию защищаемого объекта (садового участка, балкона, гаража). Изготовление самодельного датчика движения рассмотрим на примере сборки оптоэлектронного устройства, контролирующего пересечение охраняемого периметра
Из деталей для изготовления самого прибора потребуются:
- Блок питания от мобильного телефона с напряжением на входе 5,0 вольт.
- Фотоэлемент – лучше фоторезистор.
- Биполярный транзистор с «p-n-p» – переходом.
- Построечный потенциометр (сопротивление) с диапазоном регулировки 0…10,0 килоом.
- Электромагнитное реле, срабатывавшее при напряжении 5,0 вольт.
- В качестве источника излучения идеально подойдет лазерная указка, дающая тонкий, узконаправленный луч.
Порядок соединения схемы следующий:
- Катод фотоэлемента припаивается к плюсовому проводнику блока питания – эта точка будет является общим (массовым) проводником.
- К аноду фотоэлемента присоединяется просторечный потенциометр, при выведении его движка в среднее положение.
- Свободный контакт потенциометра припаивается к отрицательному проводнику блока питания, а контакт от его движка к базе транзистора.
- Эмиттер транзистора включается подсоединяется к общему «плюсу» схемы, а коллектор соединяется с одним из контактов реле.
- Второй контакт реле припаивается к отрицательному проводу блока питания.
При освещении окошка фотоэлемента лазерной указкой, поворотом движка потенциометра добиваются надежного срабатывания реле.
К коммутационным контактам реле можно подключить любой источник сигнала – ревун, лампу накаливания, светодиодный индикатор. Недостатком данного устройства является то, что оно срабатывает только при пересечении луча света.
То есть в режиме ожидания все его элементы функционируют. При различных способах коммутации контактов реле можно добиться включения света при первом пересечении луча и его отключении при повторном.
В технике широко применяются приборы для измерения величин перемещений объектов с их преобразованием в электрические сигналы. Потенциометрический датчик в большинстве конструкций представляет собой реостат и соединенный с объектом скользящий контакт, с которого снимается сигнал. Выходной параметр — это величина электрического сопротивления, зависящего от углового или линейного перемещения подвижного элемента.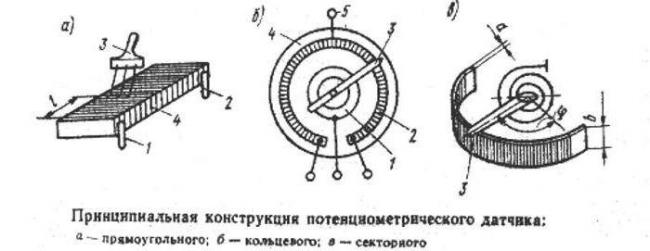
Материалы
Каркас изготавливается из диэлектрического материала: керамики, гетинакса, текстолита, пластмассы. Применяется металл с изоляционным покрытием. Его высокая теплопроводность дает возможность хорошо отводить тепло от провода датчика.
Металл обмотки обладает высоким удельным электрическим сопротивлением, стойкостью к коррозии, небольшим влиянием температуры, прочностью на истирание и разрыв. Этим требованиям соответствует манганин, константан, никельхромовые сплавы. Намотка также может быть ламельной или пленочной.
Скользящие контакты снижают надежность датчиков и усложняют конструкцию. Недостатки проволочных потенциометров:
- низкая надежность контактов;
- нестабильность переходного сопротивления между движком и обмоткой из-за окисления и электроэрозии провода;
- дребезг контактов.
Большой ресурс имеют токопроводящие пластмассы, имеющие также лучшую линейность характеристики. Датчики на их основе применяются там, где требуется высокая надежность, особенно – в авиации.
Контакт щетки изготавливается с добавкой благородных металлов, чтобы они были мягче материала обмотки.
Оптические и оптоэлектронные приборы контроля перемещений
Набольшее распространение для контроля движения и измерения расстояния получили оптические триангуляторы, являющиеся по своей сути обычным оптическим (лазерным) дальномером. Для контроля малых изменений линейных величин применяются приборы с поляризационной решеткой. Кроме того, оптические датчики широко используются в системах охраны в качестве «лучевого барьера».
К достоинствам этой категории приборов можно отнести:
- Реализацию бесконтактного контроля.
- Высокую точность.
- Практически мгновенно формирование управляющего сигнала (отсутствие времени задержки срабатывания).
Недостатками высокоточных оптических датчиков считаются:
- Значительная стоимость.
- Критичность к условиям окружающей среды.
Практические примеры реализации индуктивных датчиков
На практике конструкции индуктивных датчиков могут быть реализованы по-разному. Самое простое исполнение и включение у двухпроводного одинарного датчика, который контролирует наличие металлических предметов в своей зоне чувствительности. Такие устройства часто делаются на основе Ш-образного сердечника, но это непринципиальный момент. Подобное исполнение проще в производстве.
При изменении сопротивления катушки меняется ток в цепи и падение напряжения на нагрузке. Эти изменения можно зафиксировать. Проблема в том, что сопротивление нагрузки становится критичным. Если оно слишком большое, то изменения тока при появлении металлического предмета будут относительно небольшими. Это снижает чувствительность и помехоустойчивость системы. Если оно мало, то ток в цепи будет велик, потребуется более стойкий датчик.

Поэтому существуют конструкции, у которых схема измерения встроена в корпус датчика. Генератор формирует импульсы, которые питают катушку индуктивности. При достижении определенного уровня срабатывает триггер, перебрасываясь из состояния 0 в 1 или обратно. Буферный усилитель усиливает сигнал по мощности и (или) напряжению, зажигает (гасит) светодиод и выдает дискретный сигнал для внешней схемы.
Выходной сигнал может формироваться:
- посредством электромагнитного или твердотельного реле – уровень напряжения нуля или единицы;
- «сухой контакт» электромагнитного реле;
- открытым коллектором транзистора (структуры n-p-n или p-n-p).
В этом случае для подключения датчика потребуется три провода:
- питание;
- общий провод (0 вольт);
- сигнальный провод.

Такие датчики могут питаться и от постоянного напряжения. Импульсы на индуктивность у них формируются посредством внутреннего генератора.
Для контроля положения используются дифференциальные датчики. Если контролируемый объект находится симметрично относительно обеих катушек, ток через них одинаков. При смещении в сторону поля любой обмотки происходит разбаланс, суммарный ток перестает быть равным нулю, что может быть зафиксировано индикатором со стрелкой посередине шкалы. По индикатору можно определить как величину смещения, так и его направление. Вместо стрелочного прибора можно применить схему управления, которая при получении информации об изменении положения выдаст сигнал, примет меры по выравниванию объекта, внесет коррективы в технологический процесс и т.п.

Датчики, выполненные по принципу линейно-регулируемых дифференциальных трансформаторов, выпускаются в виде законченных конструкций, представляющих собой каркас с первичной и вторичными обмотками и штоком, перемещающимся внутри (он бывает подпружиненным). Наружу выведены провода для подачи сигнала с генератора и съёма ЭДС со вторичных обмоток. К штоку механическим путём может быть присоединен контролируемый объект. Он может быть изготовлен и из диэлектрика – для измерения имеет значение лишь положение штока.
Несмотря на определенные врожденные недостатки, индуктивный датчик закрывает многие направления, связанные с бесконтактным определением предметов в пространстве. Несмотря на постоянное развитие технологий, такой тип устройств в обозримом будущем не уйдет с рынка измерительных устройств, ведь его действие основано на фундаментальных законах физики.
Что такое датчик Холла: принцип работы, устройство и способы проверки на работоспособность
Что такое герконовый датчик и где он применяется?
Что такое тензодатчик, типы тензометрических датчиков, схема подключения и их применение
Что такое индуктивность, в чём измеряется, основные формулы
Что такое трансформатор: устройство, принцип работы и назначение
Что такое электромагнитное реле, их виды и принцип работы
Что такое многоосевые контроллеры
Простыми словами, многоосевые контроллеры — современные устройства с вмонтированными микропроцессорами и интегральной программируемой схемой.
Отличаются небольшими размерами и простой управления. Применяются для точного позиционирования агрегатов по двум и более осям.





Главная сфера применения — автоматизация станочного шагового двигателя, оборудованного многоординатными электрическими приводами. Их особенность состоит в поддержке нескольких языков и способности управления в режиме онлайн.
Особенности контроллеров:
- изолированные цифровые входа/выхода;
- высокий уровень производительности;
- поддержка ведомых/ведущих устройств;
- опция удаленного управления контроллером;
- поддержка интерполяции (круговой, линейной);
- большой набор цифровых и аналоговых входов/выходов, портов Интернет и ШИМ выходов.
Популярные модели:
- PoKeys57CNC — контроллер ЧПУ с восьмью осями для программ Mach3 и Mach Его особенность состоит в поддержке работы по USB- и Ethernet-интерфейсу. Для управления применяются стандартные сигналы STEP и DIR, предусмотрено до восьми драйверов шагового типа. Модель совмещается с энкодерами, ручным пультом управления, LCD-дисплеем, а также конечными выключателями. Имеется два релейных и четыре транзисторных выхода, возможность увеличения количества выходов, поддержка Modbus TSP и т. д.
- Leadshine SMC6480 — контроллер, предназначенный для позиционного управления на базе микропроцессора. В его структуру входит логическая интегральная схема, предназначенная для отправки импульсов, контроля процесса разгона и торможения, обработки входов и выходов. Устройство способно воспроизводить импульсы с частотой до 5000 кГц и выдерживать интерполяцию до четырех осей (линейную) и до двух осей (круговую). Предусмотрены индивидуальные входы / выходы аналогового и цифрового типа, ручной вход и ШИМ выход.
 Контролер Leadshine SMC6480
Контролер Leadshine SMC6480
Кроме многоосевых контроллеров можно найти и другие устройства, к примеру, высоты плазмы. Они контролируют наличие рабочей дуги плазмы и подают команду на основную плату ЧПУ для перемещения резака.
Достоинства и недостатки индуктивных датчиков
К плюсам датчиков индуктивного типа в первую очередь относят:
- надежность конструкции;
- отсутствие контактных соединений;
- большую выходную мощность, что снижает влияние шумов и упрощает схему управления;
- высокая чувствительность;
- возможность работы от источников переменного напряжения промышленной частоты.
К основному недостатку датчиков индуктивного типа можно отнести их размеры, вес и сложность изготовления. Для намотки катушек с заданными параметрами требуется специальное оборудование. Также минусом считается необходимость точного поддержания амплитуды сигнала с задающего генератора. При её изменении меняется и область чувствительности. Так как датчики работают только на переменном токе, поддержание амплитуды становится определенной технической проблемой. Напрямую (или через понижающий трансформатор) в бытовую или производственную сеть включить датчик не получится – в ней колебания напряжения по амплитуде или частоте могут даже в нормальном режиме достигать 10%, что делает точность измерения неприемлемой.
Также на точность измерения могут влиять:
- сторонние магнитные поля (экранировка датчика невозможна исходя из принципа его действия);
- сторонние наводки ЭДС в питающих и измерительных кабелях;
- погрешности при изготовлении;
- погрешность характеристики датчика;
- люфты или деформации в месте установки датчика, не влияющие на общую работоспособность;
- зависимость точности от температуры (изменяются параметры намоточного провода, включая его сопротивление).
Неспособность датчиков индуктивности реагировать на появление в их магнитном поле диэлектрических предметов можно отнести как к достоинствам, так и к недостаткам. С одной стороны, это ограничивает область их применения. С другой – делает нечувствительными к наличию на контролируемых объектах грязи, жиров, песка и т.п.
Знание недостатков и возможных ограничений при работе индуктивных датчиков позволяют рационально использовать их достоинства.
Драйвер шарового двигателя своими руками
При желании драйвер для шарового двигателя можно сделать самостоятельно, но при условии покупки необходимого оборудования. Для начала определитесь, какой тип ЩД у вас в руках.
В биполярном устройстве всего две обмотки, поэтому количество отходящих проводов будет четыре. В униполярном двигателе обмоток больше, поэтому и количество выводов соответствующее.
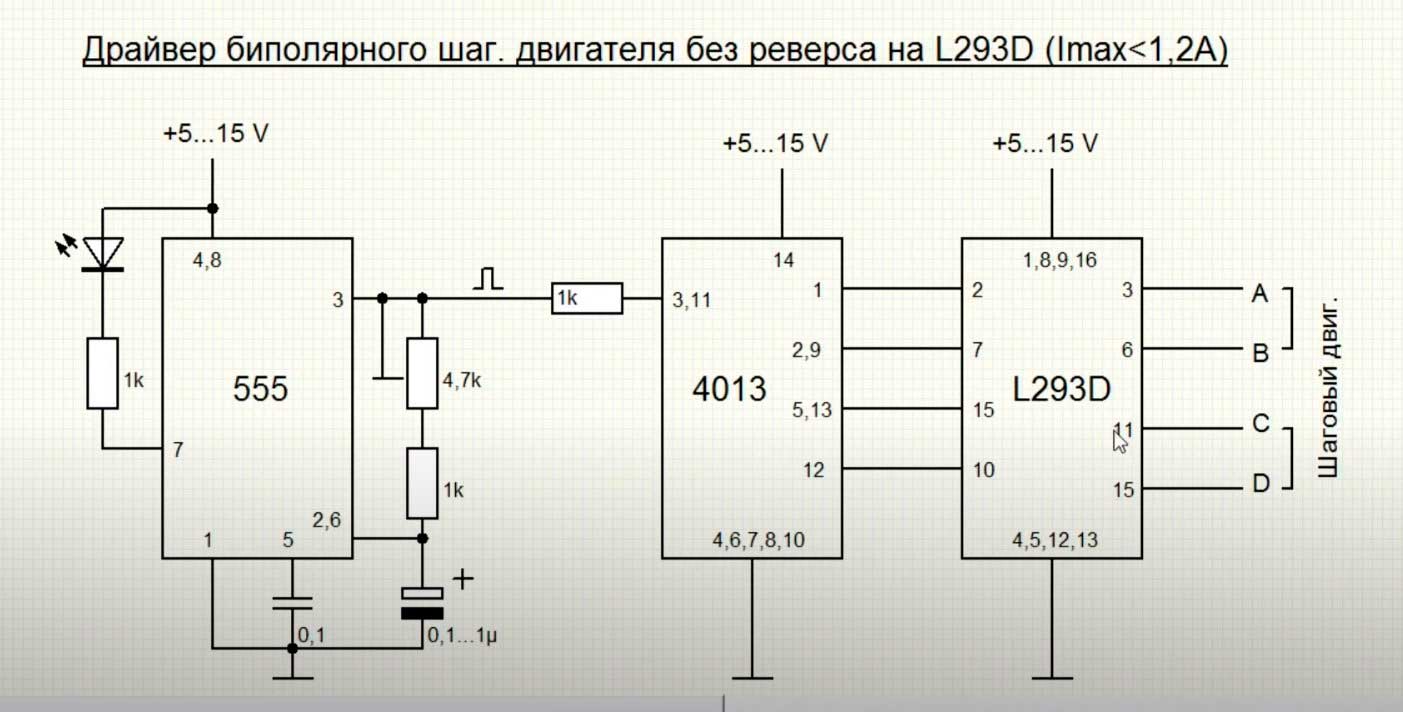
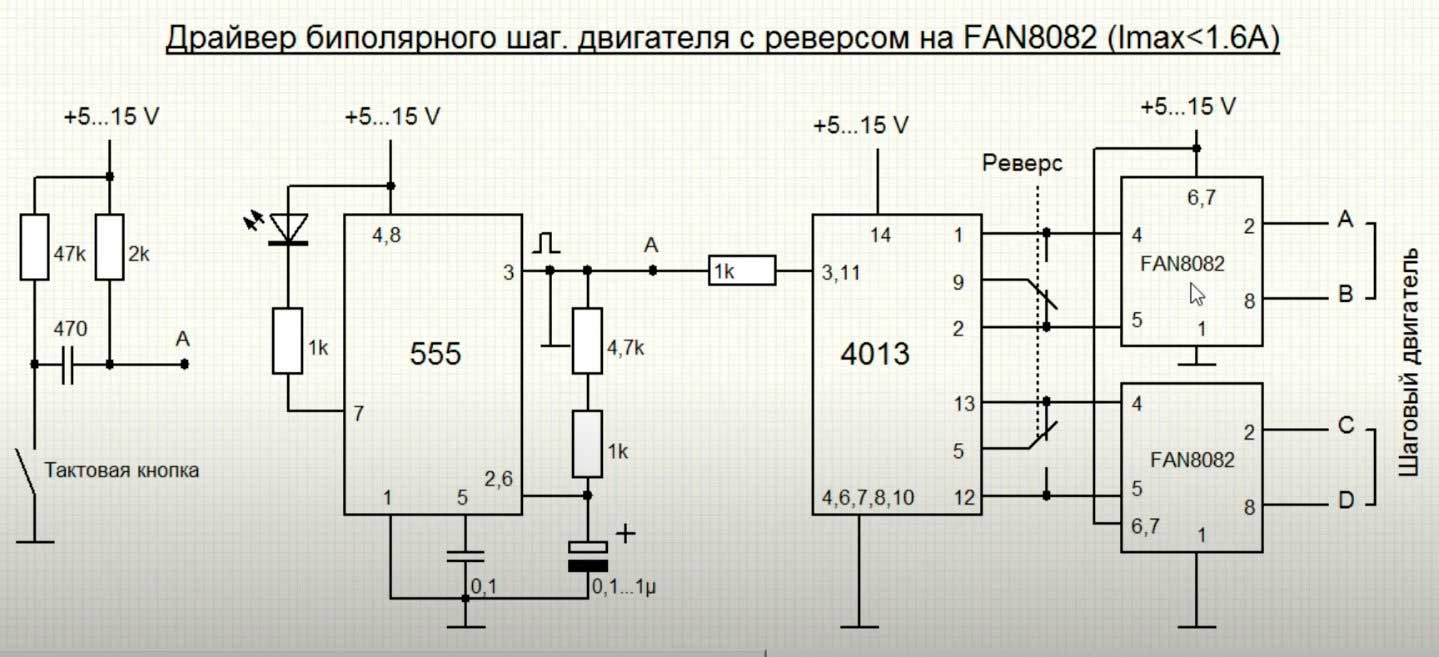
Схема управления биполярным двигателем состоит из нескольких элементов:
- Генератор импульсов.
- Коммутатор.
- Силовые ключи, управляющие обмотками моторов.
Генератор собирается на базе микросхемы 555 по обычной схеме. Каждый импульс, которые выдается генератором, обеспечивает перемещение мотора на один шаг.
Коммутатор собирается на базе микросхемы 4013, а силовая часть — L239D (микросхема-драйвер).
В роли источника питания применяется две батарейки, обеспечивающие напряжение, равное пяти вольтам. После включения питания генератор подает импульсы, частоту которых можно менять с помощью корректировки сопротивления генератора.
В зависимости от применяемой схемы можно использовать реверс или подключать ШД без него.
Для обеспечения реверса собирается такая же цепочка с той разницей, что на выходе из коммутатора можно будет менять полярность на обмотках. Иными словами, при изменении принципа подключения меняется и направление вращения.
В схеме с реверсом применяется два драйвера коллекторных двигателей FAN 8082. После включения ШД можно нажимать переключатель, чтобы вращение шло в другом направлении.
Схемы подключения.
Вместо генератора можно подключить тактовую кнопку, с помощью которой легко избежать дребезга контактных групп. При желании можно даже посчитать число шагов двигателя, если это необходимо.
Особенности первого драйвера L293D (для первой схемы):
- Напряжение устройства от +5 до +15 В.
- Размер платы 60х21 мм.
- Максимальный ток 1,2 А, но на практике при токе больше 0,5 А схема начинает греться.
- Объединяемые вывода — 4, 5, 12, 13.
Особенности второго драйвера FAN 8082 (для второй схемы):
- Напряжение устройства от +5 до +15 В.
- Максимальный ток — 1,6 А.
В отличие от прошлого устройства, этот тип драйвера лучше справляется с нагрузкой. При желании, как отмечалось выше, можно использовать гаситель дребезга контактов.
Производители различного типа приборов
Крупнейшим российским производителем приборов для контроля перемещений является компания «ЭЛТЕХ» (Санкт-Петербург), специализирующая на устройства для контроля и измерения величины линейного перемещения индуктивного, резистивного и емкостного типа.
Линейные потенциометры модельных линий «Longfellow-2» и «DuraStar» обеспечивает измерение величины перемещения в пределах до 610,0 миллиметров с точностью 0,5%. Стоимость приборов зависит от измеряемого диапазона (модели) и объема поставки и оговаривается при заказе.
В последнее время большой популярностью пользуется недорогие, но достаточно точные приборы китайского производства.
Наиболее распространены следующие модели:
- «DEPP EP15-series» – приборы индукционного типа, применяемые в станках и системах автоматического контроля;
- Оптическое устройство «HENGXIA K100-series» позволяет контролировать размеры в диапазоне 50,0…7200,0 миллиметров;
- Линейный энкодер «Roundss Rlc50d» по сути является электронной рулеткой, позволяющей с высокой точностью замерять размеры и контролировать пройденный путь.
Стоимость китайской продукции зависит от курсовой стоимости рубля и уточняется при заказе.
Преимущества и недостатки
Перед применением шагового двигателя необходимо изучить его плюсы и минусы. По ним проще судить об актуальности применения оборудования для решения задач разной сложности.







Плюсы:
- Точность. При подаче напряжения на определенные обмотки ротор поворачивается на строго определенный угол.
- Продолжительный срок службы. Если следить за оборудование, проводить периодические проверки и восстановительные процедуры, шаговый двигатель способен прослужить не меньше станка.
- Часто применяется в качестве более дешевой альтернативы сервопривода. Его часто применяют для автоматизации разного рода узлов.
- Стабильность. ШД работает при разных нагрузках и не боится колебания этого параметра.
- Легкость в применении. Управление шаговым двигателем не требует специальных знаний. Разобраться в принципе действия и правилах использования может даже новичок.
- Отличные характеристики: поддержка максимального момента вращения (даже при низкой скорости), четкость фиксации после остановки.
- Простота ремонта. Имеет простую конструкцию, поэтому с обслуживанием и восстановлением не возникает трудностей.
Минусы:
- Низкий момент. ШД не могут похвастаться достаточным моментом при повышении скорости вращения. Единственный выход — улучшение динамических параметров с помощью специальных ШИМ-драйверов.
- Вибрации. Из-за дискретности шага возникают вибрации, которые неизбежно приводят к уменьшению момента вращения и появлению резонансов в системе.
- Риск нарушения позиционирования. Изменение этого параметра возможно при повышении нагрузки выше допустимого параметра.
- Небольшая эффективность. Шаговый двигатель использует много энергии даже при минимальной нагрузке.
- Трудности с набором скорости. Агрегат с трудом набирает обороты после мгновенной перегрузки.
- Риск «проскальзывания» ротора. Это известная проблема, проявляющаяся в случае повышения нагрузки выше допустимого значения. Для ее решения можно установить датчик или увеличить мощность мотора.
Это не исчерпывающий список слабых и сильных характеристик шагового механизма, но достаточный для принятия решения.
Сфера применения
Шаговые двигатели получили широкое применение и устанавливаются во многих механизмах.
Примеры:
- Периферийные устройства вычислительных машин.
- Станки с числовым программным управлением (ЧПУ): XY-столы, фрезерные станки, чертежные автоматы.
- Устройства компьютерной памяти.
- Оборудование для чтения оптических дисков.
- Перфоратор и считыватель ленты и т. д.
 Фрезерный станок с ЧПУ
Фрезерный станок с ЧПУ
Активное применение в машиностроении получили двухфазные шаговые электродвигатели гибридного типа. Также они используются в приводах разных машин и механизмов, которые работают в режиме «старт-стоп».
Принцип работы
В зависимости от вида агрегата его конструктивные особенности могут отличаться, но общий принцип действия почти неизменный. Так, на статоре предусмотрены четыре обмотки, расположенные под 90-градусным углом.
Как только на первую обмотку подается напряжение, ротор перемещается на указанный выше угол. При поступлении напряжения на вторую, третью и четвертую обмотку вал продолжает вращаться до прохождения полного круга. Далее процесс повторяется сначала.

При желании изменить очередность вращения требуется подавать импульсы в обратном направлении. Для удобства пользователи могут управлять ШД и менять его характеристики с учетом особенностей использования.
Конструкции датчиков
Датчик линейного перемещения потенциометрический состоит из диэлектрического каркаса различной формы (пластины, цилиндра, кольца и др.), на который наматывается изолированный провод, присоединенный к зажимам и закрепленный хомутами на концах. По обмотке перемещается металлическая щетка. Для датчиков поворотного типа каркасы делаются кольцевой формы, продольного – прямолинейные. В местах контакта с движком изоляция на проводе отсутствует.
На зажимы подается напряжение питания. Выходной сигнал снимается между одним из концов провода и контактом щетки, хотя есть другие схемы подключений.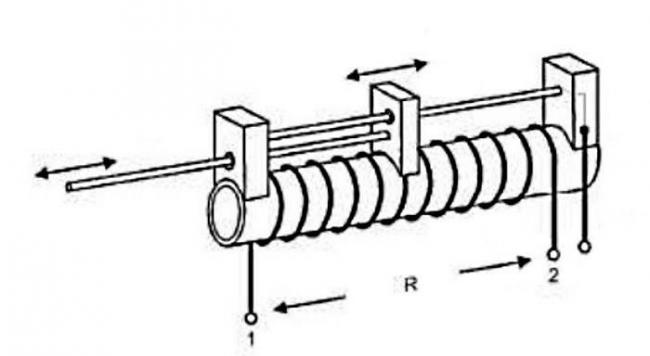
Каждый линейный потенциометрический датчик имеет статическую характеристику в виде зависимости величины выходного сигнала от перемещения контакта щетки.
Трехфазные шаговые двигатели
Главная особенность 3-фазных шаговых моторов — возможность подключения к трем фазам постоянного тока. Они применяются в оборудовании, нуждающемся в более точном позиционировании, минимальных вибрациях и низком уровне шума. В остальном сфера использования таких ШД ничем не отличается.
Характеристики:
- угловой шаг — 1,2 градуса;
- сопротивление фазы — от 0,24 до 1,4 Ом;
- индуктивность — от 0,267 до 9,82 мГн.
Плюсы 3-фазных ШД:
- равномерный момент;
- улучшенные параметры разгона и торможения;
- сохранение рабочего момента на больших оборотах;
- минимальная шумность;
- низкая вибрация.
При выборе необходимо учитывать рабочий ток, угловой шаг, момент, индуктивность и зависимость момента / скорости. Также необходимо учесть параметры вала (его диаметр).

Как безошибочно выбрать датчик движения для включения света
Существуют определенное количество конкретных критериев выбора оборудования для регистрации перемещения:
Место установки. Если датчик будет установлен снаружи помещения, то степень защиты IP прибора должна быть от 55, лучший вариант IP 65. Но если над оборудованием находится защищающее от осадков приспособление типа навеса, то можно использовать IP 44. Эксплуатация устройства включения освещения при перемещении объекта в закрытом помещении таких как дом, дача, гараж и тому подобные возможна с более низкими показателями степени защиты.
Невозможности прохода сигнала. Из-за различных видов и типов датчиков существуют разные возможности препятствия сигналу сенсора. Например, при эксплуатации инфракрасных регистраторов, перед ними не должно быть никаких преград, при применении акустических – отсутствие посторонних звуков и шумов. А вот при использовании микроволновых и комбинированных видов датчико-преобразующей аппаратуры на качество сигнала, практически, никакие внешние факторы не оказывают влияния. Потому их устанавливаю на больших складах, в гаражах, системах аварийного оповещения и сигнализации.
Угол обзора. Если помещение имеет несколько дверных проемов, то лучше эксплуатировать датчик движения с углом обнаружения 360 градусов. Если же помещение снабжено одним входом или является проходным, то можно применить, к примеру, детектор с обзором 180 градусов, который будет направлен в сторону возможного появления человека.
Мощность системы освещения. Мощность устройства обнаружения перемещения напрямую зависит от того, какую мощность электроэнергии потребляет световые приборы. Величина мощности должна быть немного больше, чем значение мощности системы освещения.
Радиус действия. Эффективность работы прибора обнаружения движения для активации системы освещения прямо пропорционально зависит от расстояния его действия. В основном, радиус реагирования датчика колеблется в пределах 6-50 м. Данный параметр несомненно зависит от того, где он применяется. Если в тесном помещении, то можно использовать сенсор с минимальным радиусом действия. А вот для того, чтобы включить световое оборудование вне здания или строения, понадобится более обширная площадь обнаружения движения.
Фотореле. Это дополнительный модуль, которым снабжаются некоторые модели датчиков. Фотореле является детектором освещенности. Принцип действия заключается в том, что если параметр освещенности ниже настроек фотореле, то свет включается, а если выше, то свет остается выключенным. Наличие данного элемента позволяет значительно сэкономить электроэнергию.
Отсутствие возможности обнаружения животных
Параметр датчиков движения, на который тоже надо обратить внимание. Данная функция прибора позволяет избегать провокации сенсора на срабатывание из-за перемещения различных животных, которая сэкономит деньги за свет.
Вышеперечисленные критерии выбора должны помочь правильно выбрать оптимальные и целесообразные регистраторы движения, предназначенные для активации светового оборудования.
Что такое шаговый двигатель
Шаговый двигатель — электромотор, где импульсное питание током приводит к перемещению роторной части на заданный угол. Относится к классу бесколлеркторных электромоторов постоянного тока.
После его запуска создается наибольший момент при минимальной скорости, а сам двигатель показывает отличные характеристики даже в состоянии покоя.
Управление осуществляется посредством дискретных импульсов, формируемых на драйвере мотора.
Первые шаговые двигатели имели вид электромагнита, вращающего в момент включения храповое колесо. Каждое включение приводило к перемещению на одну позицию.
За время эксплуатации моторы были существенно оптимизированы с позиции конструктивных и функциональных параметров.
Основные характеристики
При выборе шагового двигателя необходимо смотреть на его параметры.
Выделим основные моменты:
- Количество полных шагов. От этого показателя зависит плавность и точность хода, а также разрешающая способность. В современных моделях число полных шагов должно быть в пределах 200-400.
- Сопротивление обмотки. Свидетельствует о напряжении, которое может выдать агрегат.
- Угол дискретного перемещения. Считается путем деления 360 градусов на число отдельных перемещений за оборот. Оптимальный показатель от 0,9 до 1,8 градуса.
- Индуктивность фазы. Определяет скорость увеличения тока, что актуально при ускоренном вращении вала.
- Пробивное напряжение. Максимальный параметр, при котором нарушается целостность изоляционного слоя и определяется безопасность применения.
- Сопротивление изоляции. Измеряется между каждой из обмоток и кожухом.
- Номинальный ток. Наибольший параметр, при котором возможна безопасная эксплуатация агрегата.
- Допустимое напряжение («постоянка»). Измерение осуществляется на витках. Иногда этот параметр не указывается, но в таком случае его можно посчитать по закону Ома.
Отдельное внимание важно уделить еще одному параметру — моменту. Он бывает нескольких видов:
- удерживающий: актуален в случае полной остановки и питания током двух фаз;
- крутящий: зависит от частоты вращения, указывается максимальный показатель для агрегата;
- стопорный: необходим для проворачивания вала при отсутствии питания;
- инерционный: чем ниже этот показатель, тем быстрее разгоняется двигатель.
Комплексный анализ характеристик позволяет с большей точностью подобрать устройство под решение конкретных задач.